


When applying constraints to a model that includes remote points, it is important to ensure that the model is not over-constrained. Since the Explicit Dynamics solver treats the remote point and its scoped region as a single rigid body, the model could be over-constrained in the following two examples:
Two remote points share common nodes in their scoped regions. This is an over-constraint because each remote point generates its own rigid body and rigid bodies cannot share nodes.
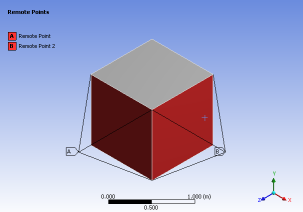
Example of an overconstrained model caused by two remote points scoped to adjacent faces.
A velocity boundary condition applied to some or all of the nodes in a remote point scoping, and a remote displacement applied to the remote point.
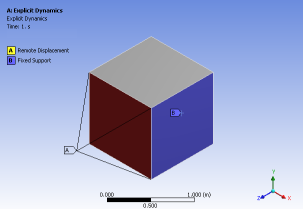
Example of an overconstrained model caused by a constraining boundary condition such as a fixed support applied to a face which is adjacent to a remote point scoping with a remote displacement applied.
This list of examples is not exhaustive and a setup error will be issued to the user on solve if any such over-constraints occur.