


For vessels traveling with a constant speed, Equation 4–39 shows
that the encounter frequency associated to an incident wave frequency varies with the relative
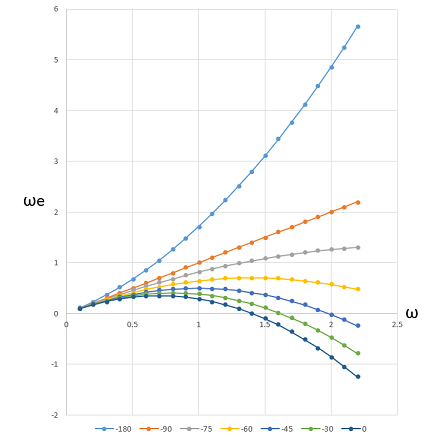
heading angle between the forward speed and the wave propagation direction. When the magnitude
of the relative heading angle is less than 90° ( ), the peak encounter frequency,
), the peak encounter frequency,  , is determined by:
, is determined by:
 | (4–80) |
and negative encounter frequency may occur when the incident wave frequency is high enough, as shown in the following figure:
Only a single structure traveling with a constant speed is discussed in this section.
Considering the body boundary condition given in Equation 4–41, the
radiation potential  due to the jth motion with unit amplitude is
split into two components: the encounter frequency related component
due to the jth motion with unit amplitude is
split into two components: the encounter frequency related component  and the forward speed related component
and the forward speed related component  :
:
 | (4–81) |
In addition, to satisfying the Laplace equation (Equation 4–13), the
seabed boundary condition (Equation 4–16), and the simplified free
surface equation (Equation 4–47),  ,
,  satisfy the wetted surface boundary conditions:
satisfy the wetted surface boundary conditions:
 | (4–82) |
The definition of the forward speed related component  can be simply derived as:
can be simply derived as:
 | (4–83) |
The total radiation potential due to the jth unit motion is rewritten as:
 | (4–84) |
Based on all the boundary conditions of the encounter frequency related potential
component  , it is found that:
, it is found that:
 | (4–85) |
Combining the relationships given in Equation 4–80 through Equation 4–85, the radiation potentials at a negative encounter frequency can be expressed by the radiation potentials at the corresponding positive encounter frequency:
 | (4–86) |
Introducing a new function:
 | (4–87) |
and substituting Equation 4–84 into Equation 4–46, the added mass and damping of a structure with forward speed can be represented as:
 | (4–88) |
Employing the definition given by Equation 4–87 and the property of
the encounter frequency related potential component  from Equation 4–85, it is found that:
from Equation 4–85, it is found that:
 | (4–89) |
Substituting this relationship into Equation 4–88, the added mass and damping coefficients at the negative frequency can be uniquely determined through the hydrodynamic properties at the corresponding positive encounter frequency.
Based on the above discussions, a set of positive encounter frequencies are necessarily selected to create the hydrodynamic database when the frequency domain simulation of the vessel traveling in multi-directional waves is carried out. The radiation wave properties, such as radiation wave pressure, added mass, and damping coefficients, at the negative encounter frequencies can be derived from the hydrodynamic database at the corresponding positive encounter frequencies.