This page describes core LiDAR principles and introduces the Rotating LiDAR feature.
LiDAR Principle
A rotating LiDAR is a distance measuring device sending short and rapid pulses
of light in specific angular directions while rotating to capture information about its
surrounding environment. It works on the principle of a radar but uses light instead of
radio waves.
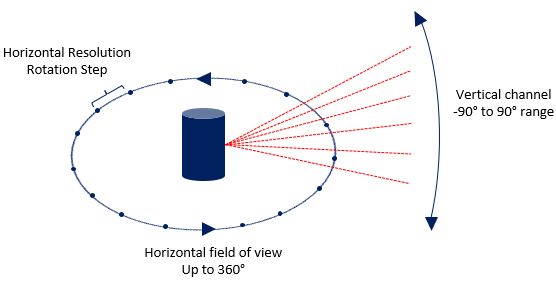
The most obvious advantage of a rotating LiDAR lies in its capacity to cover a
360° field of view. In contrast, Solid State LiDARs rarely exceed a 120° field of view.
Speos Geometric Rotating LiDAR Simulation allows you to
reproduce the behavior of a rotating LiDAR.
Geometric Rotating LiDAR Simulation in Speos
The rays are sent in specific angular directions and either interact with a geometry or
vanish in the environment.
Note: The sensor does not consider the geometries' optical properties.
At the end of the simulation, interactions and impacts are displayed in the 3D view to represent the LiDAR field of view.
To perform a custom field of view study, you can control every aspect of the
LiDAR scanning pattern:
Horizontal field of view: allows you to define the azimuthal range (up
to 360°) and sampling of LiDAR's aiming area.
Vertical field of view:allows you to define the elevation for each
channel of the LiDAR.
Speos LiDAR covers the standard Rotating LiDAR configuration, which means:
The Speos LiDAR can analyze a 360° field of view,
The distance is measured with a single light pulse.
LiDAR Simulations Results
Geometric Rotating LiDAR Simulation provides two types of results:
Fields of View: Each ray and its
corresponding impact with the geometries are displayed in the 3D view. The set of rays
allows you to visualize the sensor's viewing range and reach.
Point Cloud: This .txt file contains all points (impacts) collected during simulation. Each impact represents an individual point with its own set of coordinates x, y, z (millimeters), the power (Watt) measured at the impact, and the distance (millimeter) between the impact and the receiver. This file can then be used as a future input in other simulation software.