


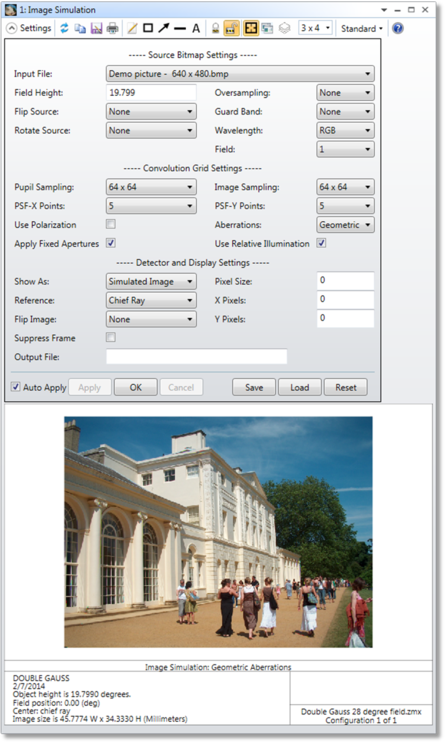
[画像シミュレーション] (Image Simulation)
この機能は、点強度分布関数の配列で光源のビットマップ ファイルをコンボリューション処理することにより、像の形成をシミュレーションします。回折、収差、ディストーション、周辺光量比、像の方向、偏光などによる効果が考慮されます。
光源ビットマップ設定
[入力ファイル] (Input File) 光源ビットマップのファイル名。BMP、JPG、PNG、IMA、BIM の各形式のファイルを指定できます。IMA および BIM のファイル フォーマットについては、「IMA 形式」および「BIM 形式」を参照してください。これらの入力ファイルは、<images> フォルダに保存されます (「[フォルダ] (Folders)」を参照してください)。IMA ファイルおよび BIM ファイルでは、各方向が 2 ピクセル以上、8,000 ピクセル以下であること、BMP、JPG、および PNG の各ファイルでは、各方向が 2 ピクセル以上、16,000 ピクセル以下であることが必要です。
[視野の高さ] (Field Height) この値は、視野座標の中で光源ビットマップが y 軸方向に占める全高を定義します。その単位は、現在の視野定義が高さであるか角度であるかに応じて、それぞれレンズ ユニットまたは度 (°) になります。視野タイプが実像高さの場合、この解析では視野タイプが自動的に近軸像高に変更されます。これにより、実像高さによって像のディストーションがマスクされる問題を回避できます。視野の高さは、オーバーサンプリング、ガード バンド、回転などの必要とするあらゆる処理を適用して得られたビットマップに適用されます。
[オーバーサンプリング] (Oversampling) オーバーサンプリングでは、1 つのピクセルを、2 つ、4 つ、またはそれ以上の隣接する同等のピクセルにコピーすることにより、光源ビットマップのピクセル解像度を引き上げます。この機能の目的は、視野ユニットあたりのピクセル数を多くすることです。いずれかの方向で最大ピクセル数が 16,000 を超えない限り、指定したオーバーサンプリングに達するまで、一度に 2 倍ずつ増加するようにオーバーサンプリングが適用されます。この上限はオーバーサンプリング機能にのみ適用され、入力ファイルには適用されません。オーバーサンプリングを適用したうえで光学系への影響が考慮されます。
[光源の反転] (Flip Source) 光源ビットマップの左右、上下、またはその両方を反転します。光源ビットマップを反転したうえで、光学系の影響が考慮されます。
[ガード バンド] (Guard Band) この機能は、ピクセルの数を繰り返し 2 倍にすることで光源ビットマップのピクセル解像度を引き上げます。この 2 倍にする処理はこの解析にのみ反映され、元のビットマップ ファイルは変更されません。この結果、黒い「ガード バンド」が元の画像の周囲に生成されます。この機能の目的は、目的の画像の周囲に領域を追加しながら、視野ユニットあたりのピクセル数を大きくすることです。光源ビットマップの視野サイズと比較して点強度分布関数が大きい場合に、この処理が特に効果的です。いずれかの方向の最大ピクセル数が 16,000 を超えない限り、指定したサイズに達するまで、一度に 2 倍ずつ増加するようにガード バンドが適用されます。この上限はガード バンド機能にのみ適用され、入力ファイルには適用されません。光源ビットマップにガード バンドを適用したうえで、光学系への影響が考慮されます。
[光源の回転] (Rotate Source) 光源ビットマップを回転します。光源ビットマップに回転を適用したうえで、光学系への影響が考慮されます。
[波長] (Wavelength) [RGB] を選択すると、現在の波長の定義に関係なく、赤、緑、および青としてそれぞれ 0.606 µm、0.535 µm、および 0.465 µm の 3 波長が定義されます。[1+2+3] を選択すると、波長データ ボックスで現在定義されている波長 1、2、および 3 が使用されます。光源ビットマップの赤チャネルが波長 3、緑チャネルが波長 2、青チャネルが波長 1 にそれぞれ使用されます。このオプションを使用してどのような波長を定義していても、表示される画像は RGB 形式です。波長 6 などの特定の波長を 1 つ選択すると、波長 4、7、10、13、…には B チャネル画像が使用されます。波長 5、8、11、14、…には G チャネル画像が使用されます。波長 6、9、12、15、…には R チャネル画像が使用されます。
波長の重み付けは通常無視されます。最終的な画像に影響する色の重み付けは、光源ビットマップに記述された色振幅および光学系の相対透過率によってのみ決まります。例外は、単色の IMA ファイルを使用して、このオプションで [1+2+3] を選択し、3 つの波長を定義している場合です。この場合にのみ、波長の重み付けを使用して、相対的な色の重み付けが定義されます。
[視野] (Field) 定義した任意の視野位置を光源ビットマップの中心とすることができます。得られた像は、この視野位置を中心とします。
コンボリューション グリッドの設定
[瞳のサンプリング] (Pupil Sampling) PSF グリッドを計算するために瞳空間で使用するグリッド サンプリング。
[像のサンプリング] (Image Sampling) PSF グリッドを計算するために光源ビットマップ空間で使用するグリッド サンプリング。
[PSF-X ポイント数] (PSF X Points)、[PSF-Y ポイント数] (PSF Y Points) PSF の計算対象とする、X 方向および Y 方向の視野点の数。これらのグリッド点の間にある視野点には、補間済みの PSF が使用されます。
[偏光を使用] (Use Polarization) チェックすると、偏光が考慮されるようになります。偏光の状態を定義する方法と解析機能での偏光の使用方法については「[偏光] (Polarization) (システム エクスプローラ)」を参照してください。
[固定アパチャーを適用] (Apply Fixed Apertures) チェックすると、アパチャーが定義されていない、光学屈折力を持つすべての面が、この計算では、現在のクリア半径値または半径値の円形アパチャーを持つように変更されます。このようにアパチャー定義を変更しないと、面上で指定されているクリア半径または半径から逸脱する位置を光線が通過する可能性があります。特に、視野点で定義した視野を視野高さが超える場合にこの傾向が強くなります。これにより、多くの場合は像のエッジで、誤解につながるような照度が発生することがあります。
[周辺光量比を使用] (Use Relative Illumination) チェックすると、「[周辺光量比] (Relative Illumination)」で説明している計算が使用されます。この計算では、射出瞳の放射輝度と立体角の効果を正確に反映するように、視野のさまざまな点からの光線が重み付けされます。この機能を使用すると、一般的に計算結果は高精度になりますが、計算に長時間を要するようになります。光学系を通過して像面まで追跡できる光線が少なすぎる場合、周辺光量比はゼロと見なされ、結果が不正確になる可能性があります。解析の [周辺光量比] (Relative Illumination) をデフォルト設定で使用することで、このような状況になるかどうかを確認できます。チェックをはずすと、主光線を使用した計算から全体的な強度が求められます。このオプションのチェックをはずした状態で主光線を追跡できない場合、周辺光量比はゼロと見なされることに注意してください。主光線を追跡できない場合は [周辺光量比を使用] (Use Relative Illumination) をチェックして試します。
[収差] (Aberrations) 収差を無視するには [なし] (None)、光線収差のみを考慮するには [幾何光学] (Geometric)、ホイヘンス PSF を使用して収差をモデル化するには [回折] (Diffraction) をそれぞれ選択します。[回折] (Diffraction) を選択していても、回折 PSF を正確に計算できないほど収差が多いと、解析が自動的に [幾何光学] (Geometric) に切り替わることがあります。以下の「説明」を参照してください。
ディテクタと表示の設定
[表示方法] (Show As) オーバーサンプリング、ガード バンド、回転による効果を考慮した入力ビットマップを表示するには [シミュレーション画像] (Simulated Image) または [光源ビットマップ] (Source Bitmap) を選択し、視野全体にわたって計算したすべての PSF 関数を表示するには [PSF グリッド] (PSF Grid) を選択します。以下の「説明」を参照してください。
[基準] (Reference) プロットの中心とする基準座標として、主光線、面の頂点、または主波長の主光線を選択します。主波長の主光線を選択すると、唯一選択している波長がほかにあっても、主波長の主光線が選択されます。
[フレームの非表示] (Suppress Frame) チェックするとフレームが表示されず、ウィンドウ全体に画像が表示されます。
[X ピクセル] (X-Pixels)、[Y ピクセル] (Y-Pixels) 検出した画像で使用するピクセルの数。光源ビットマップにあるピクセルの数 (デフォルト値) を使用するには 0 を指定します。
[ピクセル サイズ] (Pixel Size) シミュレーションした画像のピクセル サイズ (正方ピクセル)。フォーカル光学系の場合、単位はレンズ ユニットです。アフォーカル光学系の場合、単位は余弦です。光源ビットマップの中心ピクセルでの光学系の倍率から計算するデフォルト値を使用するには 0 を指定します。デフォルト値の計算は純粋に光線に基づきます。幾何光学像が PSF よりも小さくなるような視野高さでは、ピクセルやディテクタのサイズが過度に小さくなります。
[反転画像] (Flip Image) シミュレーションした画像の左右、上下、またはその両方を反転します。
[出力ファイル] (Output File) 拡張子が BMP、JPG、または PNG のファイル名を指定すると、シミュレーションした画像が指定のファイルに書き込まれ、<images> フォルダに保存されます (「[フォルダの設定] (Folders)」を参照してください)。
説明 :
画像シミュレーションのアルゴリズムでは、以下の手順で画像の外観が計算されます。
- 選択されているオプションに応じて、オーバーサンプリング、回転、ガード バンドを光源ビットマップに適用します。
- 点強度分布関数 (PSF) のグリッドを計算します。視野サイズ全体にグリッドを適用し、ビットマップと視野サイズ設定で定義された視野で選択されている点における収差を、このグリッドで記述します。この PSF グリッドには、偏光と周辺光量比による効果も反映されます。
- 変更された光源ビットマップの各ピクセルに合わせて、PSF グリッドを補間します。ピクセルごとに、変更済みの光源ビットマップで実効的な PSF をコンボリューション処理し、収差のあるビットマップ画像を生成します。
- 得られた画像ビットマップを、検出した画像ピクセル サイズ、幾何光学的ディストーション、および倍率色収差に対応するようにスケーリングおよび伸張します。
このアルゴリズムで最も重要な部分は、PSF グリッドの計算です。[PSF-X ポイント数] (PSF X Points) と [PSF-Y ポイント数] (PSF Y Points) の設定は、視野の各方向で計算する PSF の数を指定します。PSF を使用して収差をモデル化する手法として、[回折] (Diffraction)、[幾何光学] (Geometric)、および [なし] (None) で指定する 3 種類があります。[回折] (Diffraction) ではホイヘンス PSF を使用します (詳細については、「[ホイヘンス PSF] (Huygens PSF)」を参照してください)。
ホイヘンス PSF では、ほとんどすべての光学系で回折効果を正確にモデル化できますが、スポット ダイアグラムの積分に基づく幾何光学的 PSF より処理に時間を要します。また、収差が著しい条件化では、ホイヘンス PSF で正確な結果を得ることが困難になります (この機能のしきい値は回折限界の 20 倍です)。この画像シミュレーション アルゴリズムでは、ホイヘンス PSF で計算できない状況を検出し、必要に応じて自動的に幾何光学的 PSF に切り替えます。この切り替えは視野ごとおよび波長ごとに別々に実行されるので、回折限界の部分と収差が著しい部分が視野の中で混在する結像光学系でも、[回折] (Diffraction) を選択すれば正確にモデル化できます。収差タイプとして [なし] (None) を選択すると、PSF グリッドはデルタ関数の配列となり、倍率色収差とディストーション以外の収差は考慮されなくなります。
PSF の計算では周辺光量比を考慮できるほか、必要に応じて偏光を考慮することもできます。PSF グリッドでは、変更された光源ビットマップの各ピクセルでの PSF を推測するために、計算された視野点間で補間が実行されます。得られた PSF を光源ビットマップでコンボリューション処理して、収差のあるビットマップ画像を生成します。使用する PSF グリッド点の数が多いほど、シミュレーションは正確になりますが、計算時間も長くなります。
像面が平面ではない場合、収差とディストーションはすべて湾曲した像面で計算されます。シミュレーションした画像は XY 平面上に投影され、像面の z 座標は無視されます。投影された平面では、ピクセルが正方形であると見なされます。
出力画像の明るさは、そのピークが入力画像と同じになるように画像を正規化することによって決まります。[周辺光量比を使用] (Use Relative Illumination) のチェックをはずした場合、像全体にわたる周辺光量比を求めるには主光線が追跡可能であることが必要です。
シミュレーションした画像は、像面のローカル -Z 軸側から見下ろしたような状態で表示されます。
デフォルトのピクセル サイズと画像サイズ
[ピクセル サイズ] (Pixel Size) パラメータを 0 に設定すると、次のようにデフォルト値が計算されます。
- 視野空間におけるピクセル サイズ (視野高さ/ビットマップの Y 方向ピクセル数) を計算します。視野空間におけるピクセル サイズの単位は視野タイプで決まります。
- 視野空間中央のピクセルの右上隅と左下隅から光線を追跡し、像面上での光線の座標を求めます。
- つづいて、次の図のように、像面上の光線の座標から像面上でのデフォルトのピクセル サイズを計算します。
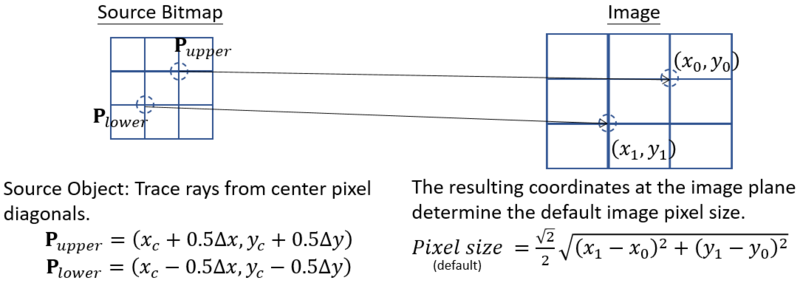
xc と yc は、この設定の [視野] (Field) で定義した視野座標、∆x と∆y は、手順 1 で計算したピクセル サイズです。
画像シミュレーション結果の画面下部のテキストに表示された画像サイズは、X 方向と y 方向のピクセル サイズとピクセル数の積です。x 方向と y 方向のピクセル数については、[X ピクセル] (X-Pixels) と [Y ピクセル] (Y-Pixels) の説明を参照してください。
使用上のヒント
シミュレーションの正確さは、入力画像の解像度により最終的には必ず制限されます。光学系の解像度が十分であれば、光源ビットマップを構成する個々のピクセルの状態がはっきり見えてきます。これは、シミュレーションした画像に階段状のエッジとして現れます。このような影響はオーバーサンプリング機能で低減できますが、計算時間は長くなります。
視野が大きいと、単一のピクセルの面積に比べて、PSF が小さくなることが少なくありません。このような場合は、PSF の計算を多数実行することにより、1 つのピクセルのみで PSF 全体を表現する、実質的にデルタ関数といえる状態が得られます。この状況で、収差を無視するか、少なくとも回折手法から幾何光学的手法による PSF 計算に切り替えることにより、計算を高速に実行できます。
PSF とほぼ同じサイズの画像か、さらには PSF よりも小さい画像が生成されるほど、倍率または視野がきわめて小さい場合は、ガード バンド機能が必要になる可能性が高くなります。これは、光源の画像のピクセル全体にわたって PSF のコンボリューション処理が実行されるためです。PSF が像空間の光源ビットマップより大きい場合、それによって元の画像の外側に広がった部分がコンボリューションによって失われます。ガード バンドにより、元の画像の周囲に黒い領域が追加されるので、この領域を使用して PSF による広がりを表示できます。
最も重要な診断結果は、[表示方法] (Show As) 設定にある [PSF グリッド] (PSF Grid) です。シミュレーションした画像を計算する前に PSF グリッドを表示し、適切なサンプリングによるデータが表示されることの確認をお勧めします。
視野角の使用に関する注釈
視野の高さにより、光学系から見た光源ビットマップの物理サイズが決まります。たとえば、30 x 30 ピクセルの光源ビットマップを使用して、視野の高さが 2.0 mm の場合 (ここでは視野を物体高さで定義していることを前提としています)、各ピクセルの領域は 66.67 マイクロメートルになります。同じ光源ビットマップを全視野 40°の光学系 (視野角で定義した光学系) で使用する場合、視野全体が含まれるように視野の高さを 40 に設定できます。この場合、各ピクセルは、1.33°の正方形になります。視野角を使用して物体視野を定義する際の難点は、視野角の単位が本質的にアナモルフィックであるということです。X 方向の角度は、Y 角度 80°と Y 角度 10°では、異なる傾斜角を表します。視野角を使用していて、視野が比較的広いとき (いずれかの方向に約 40°以上)、拡大された物体の結果の解釈時には注意が必要です。
OpticStudio で使用する視野角の厳密な定義については、「視野角と視野高さ」を参照してください。
近軸像高さと実像高さの使用に関する注釈
視野を像高さで定義している場合、[視野の高さ] (Field Height) によって、物空間ではなく、像空間での物体の高さが決まります。[視野の高さ] (Field Height) の単位は必ずその視野に定義されている単位になるので、視野タイプとして像の高さを使用している場合は、[視野の高さ] (Field Height) で像空間での光源ビットマップの高さが決まります。物空間での光源のサイズは、[視野の高さ] (Field Height) をレンズの倍率で除算することで求められます。
近軸像高さを使用すると、光学系にアナモルフィックな倍率があれば、シミュレーションした画像ではその倍率はマスクされます。実像高さを使用すると、あらゆる形態のディストーションがマスクされます。このことから、実像高さを選択していても、この機能では視野の定義に近軸像高さが使用されます。
なお、実像高さも近軸像高さも使用しないことをお勧めします。代わりに、有限共役光学系では物体高さ、無限共役光学系では視野角を使用します。これらの視野タイプは、像空間での物体のサイズと方向を明確に定義しているためです。
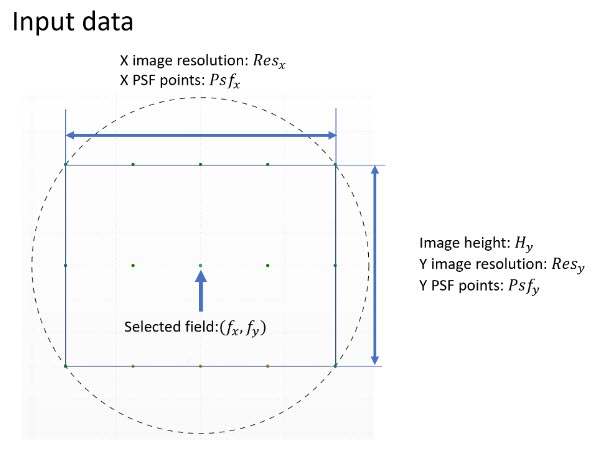
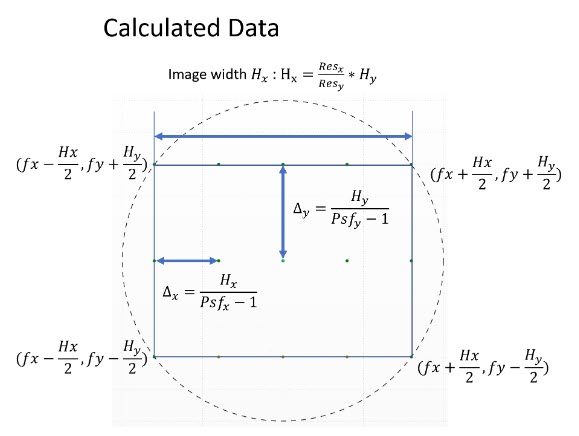
PSF グリッドは物体側から生成されます。この点は、[視野ウィザード] (Fields Wizard) のグリッド分布タイプと同様です。相違点は、ピクセル番号の最小値が 1 であること、および中央の座標が解像度の半値になることです。各グリッド点で PSF を計算する場合は、そのグリッド点における視野の主光線が PSF の中心になります。
PSF グリッドの生成に必要なデータは次のとおりです。
ディストーションについて
画像シミュレーションでのディストーション アルゴリズムは、副光線の追跡に部分的に依存しており、中央遮蔽がある場合に、ディストーション モデルは非物理的な結果を生成することがあります。また、ディストーションアルゴリズムにより、物体が無限遠にある場合、つまり物体間で焦点が合っていない場合、画角90度または90度に非常に近い角度で非物理的なアーチファクトが生成される可能性があります。中央遮蔽が存在する状況で、ディストーション が正確に計算されたことを相互確認するには、[幾何光学的ビットマップ像解析] (Geometric Bitmap Image Analysis) を使用します。
次へ :