


A Spring represents a single component force acting between two bodies over a distance and in a particular direction.
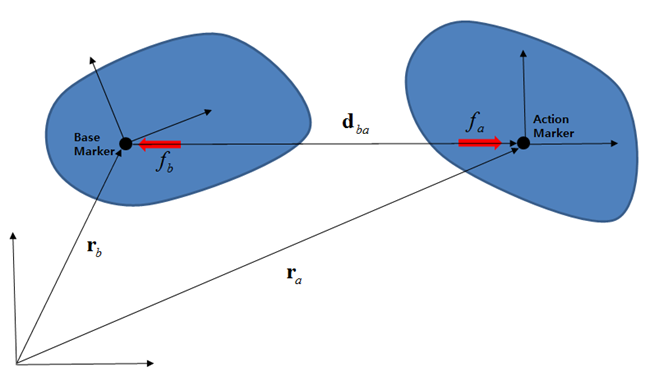
The direction of the force is along the line segment connecting the action and base markers and the magnitude of the force is linearly dependent on the relative displacement and velocity of the markers. The relative displacement and velocity between the base and action markers are calculated using the following equations:
 | (4–1) |
 | (4–2) |
where the vectors  ,
,  ,
,  , and
, and  are the absolute displacements and velocity of the action and base
markers, respectively.
are the absolute displacements and velocity of the action and base
markers, respectively.
A Spring can represent spring, damping and constant actuating forces. The spring force is calculated using the stiffness coefficient and distance and the damping force is calculated using the damping coefficient and time derivative of the distance. The constant actuating force can be defined by a preload. The linear force acting on the action marker can be written as follows:
 | (4–3) |
where the distance and its time derivative  and
and  can be calculated from the relative displacement and its time
derivative as follows.
can be calculated from the relative displacement and its time
derivative as follows.
 | (4–4) |
 | (4–5) |
If the force is positive, the markers experience a repelling force along this line, and if the force is negative, the markers experience an attracting force.
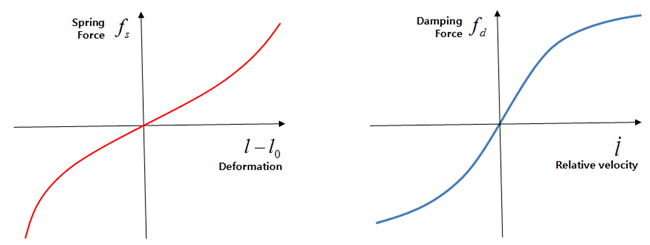
The non-linear force acting on the action marker can be written as follows:
 | (4–6) |
where  and
and  are spring force curve and damping force curve as shown in Figure 4.2: Spring and Damping Force Curves, respectively. These can be
measured by experimental method or by finite element analysis.
are spring force curve and damping force curve as shown in Figure 4.2: Spring and Damping Force Curves, respectively. These can be
measured by experimental method or by finite element analysis.
The reacting force on the base marker can be calculated as follows.
 | (4–7) |
The definitions of the parameters in Equation 4–3 and Equation 4–6 are shown in the table below.
Figure 4.3: Spring parameters
| Symbol | Description | Dimension |
 | Spring coefficient. This is an axial stiffness and can be measured by experimental method or flexible body simulation. | Force/Length |
 | Damping coefficient. This affects dynamic stiffness and can be measured by experimental method. | Force*Time/Length |
 | Free length. If the distance between two markers approaches this value, the spring force approaches zero. | Length |
 | Preload. When this value is positive, the spring is under compression. When it is negative, the spring is under tension. | Force |
 | Spring force curve. The x-axis of the curve must be the deformation in length units and the y-axis of the curve must be force. | Force |
 | Damping force curve. The x-axis of the curve must be the time derivative of the deformation in length per time units and the y-axis of the curve must be force. | Force |
Note: If the distance  approaches zero, a numerical problem can occur due to Equation 4–5. The action marker must therefore initially be apart from the
base marker and the force must have sufficient strength such that the position
of the action marker and that of the base marker do not coincide during the
simulation.
approaches zero, a numerical problem can occur due to Equation 4–5. The action marker must therefore initially be apart from the
base marker and the force must have sufficient strength such that the position
of the action marker and that of the base marker do not coincide during the
simulation.