


There are now two main versions for this file format. Version 1 is the original and is still valid. It will be described first. Version 2, which is believed to be much easier to understand and which has more capability and flexibility, will then be described.
This file is used to link the transient transformations within the
rigid body Euler Parameter file (see
Euler Parameter File Format) with the parts in an EnSight Gold format
model. It also can be used to optionally specify non-transient transformations for
center of gravity offsets and orientation placements. Version 2 has more flexibility for
the latter than does version 1. While not required, .erb is the
normal extension given to this file. The .erb file is referenced
via the rigid_body line in an EnSight Gold
Casefile
In addition to linking EnSight parts to the transformations in the rigid body Euler Parameter file (see Euler Parameter File Format), version 1 of this file can also be used to specify a units scaling factor, center of gravity offsets, and initial yaw pitch roll rotations, if needed. Note that model vector variables will be transformed as well. Please note that the order of transformations will first be the yaw pitch roll rotations (if any specified) then second, the center of gravity offsets (if any specified) and third, the euler parameter rotations and translations of the euler parameter file. So:
The order of these transformations is:
Note:
The first line needs to be exactly as shown.
EnSight Rigid Body
The second line must be the .erb version number line. (Version is 1.1, previous to EnSight 8.2 this line was not present and thus defaulted to version 1.0)
version 1.1
The third line must either be exactly
names
or
numbers
This indicates whether part names or part numbers will be used in the association of ensight parts to the rigid body information in the Euler Parameter File.
The fourth line must be a single integer n indicating the number of lines that follow in the file.
The remaining n lines contain either 3, 4, 7, or 11 tokens which must each be enclosed in quotes. When no unit scaling or center of gravity offset is needed the lines have the form of either
"ens_part_name" "eet_filename" "eet_title"
or
"ens_part_#(s)" "eet_filename" "eet_title"
depending on the state of the second line in the file.
If unit scaling is specified, then the lines have the form of either
"ens_part_name" "eet_filename" "eet_title" "u_scale"
or
"ens_part_#(s)" "eet_filename" "eet_title" "u_scale"
If center of gravity offsets are needed (without rotations), the lines are either
"ens_part_name" "eet_filename" "eet_title" "u_scale" "xoff" "yoff" "zoff"
or
"ens_part_#(s)" "eet_filename" "eet_title" "u_scale" "xoff" "yoff" "zoff"
If yaw pitch roll rotations are needed (without offsets), the lines are either
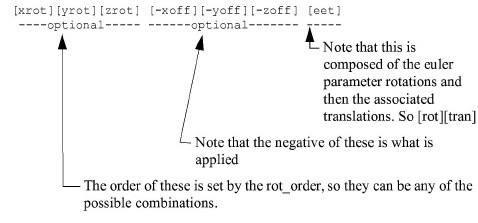
"ens_part_name" "eet_filename" "eet_title" "u_scale" "rot_order" "xrot" "yrot" "zrot"
or
"ens_part_#(s)" "eet_filename" "eet_title" "u_scale" "rot_order" "xrot" "yrot" "zrot"
If both offsets and initial yaw pitch roll rotations are needed, the lines are either (note difference in order of 3 offset offset columns and 4 rotation columns).
"ens_part_name" "eet_filename" "eet_title" "u_scale" "xoff" "yoff" "zoff" "rot_order" "xrot" "yrot" "zrot"
or
"ens_part_name" "eet_filename" "eet_title" "u_scale" "rot_order" "xrot" "yrot" "zrot" "xoff" "yoff" "zoff"
or
"ens_part_#(s)" "eet_filename" "eet_title" "u_scale" "xoff" "yoff" "zoff" "rot_order" "xrot" "yrot" "zrot"
or
"ens_part_#(s)" "eet_filename" "eet_title" "u_scale" "rot_order" "xrot" "yrot" "zrot" "xoff" "yoff" "zoff"
Where:
ens_part_name |
the actual part description given in the EnSight geometry file |
ens_part_#(s) |
a single number, comma separated list, or list of dash separated ranges of part numbers given in the EnSight geometry file |
eet_filename |
the actual name of the Euler Parameter file |
eet_title |
the actual name of the title in the columns of the Euler Parameter File which correspond to the rigid body euler values to apply to the ensight parts indicated |
u_scale |
the optional units scaling value which can be applied to the translation values in the Euler Parameter file. This is only needed if the translations of the Euler Parameter file are not in the same units as the EnSight geometry. (Note, if you use the xoff, yoff, zoff offset below, you must use this value as well - but it can be 1.0) Note: This does not scale the geometry. This is used to scale the translational values in the .eet file only. For example if your .eet file has units of millimeters but your model is in meters, putting a 1000 here will scale up all your translations appropriately. This does not scale values in the .erb file. |
xoff,yoff,zoff |
optional additional offsets to the center of gravity that can be applied. These are applied before the rotation and translations contained in the Euler Parameters file, and as such are generally not needed |
rot_order |
one of the following, indicating the order in which to apply the rotation angles. xyz yxz zxy xzy yzx zyx |
xrot,yrot,zrot |
rotation angles (in degrees) about each axis. These will be applied in the order specified with rot_order. |
Simple Sample File (using part numbers)
EnSight Rigid Body version 1.1 numbers 3 “1,5” “my.eet” “BUCKET” “2-4,6-9,11” “my.eet” “BOOM” “10” “my.eet” “LINK”
Note: The above file would require that the ensight geometry file contain parts 1 thru 11 and that the my.eet file contain titles BUCKET, BOOM, and LINK.
Sample File (using part names and optional scaling and offsets - no initial rotations):
EnSight Rigid Body version 1.1 names 11 “bucket_property_1” “my.eet” “BUCKET” “1000.0” “383.7” “105.23” “0.0” “bucket_property_2” “my.eet” “BUCKET” “1000.0” “383.7” “105.23” “0.0” “boom_property_1” “my.eet” “BOOM” “1000.0” “-35.4” “76.85” “45.6” “boom_property_2” “my.eet” “BOOM” “1000.0” “-35.4” “76.85” “45.6” “boom_property_3” “my.eet” “BOOM” “1000.0” “-35.4” “76.85” “45.6” “boom_enda” “my.eet” “BOOM” “1000.0” “-35.4” “76.85” “45.6” “boom_endb” “my.eet” “BOOM” “1000.0” “-35.4” “76.85” “45.6” “boom_top” “my.eet” “BOOM” “1000.0” “-35.4” “76.85” “45.6” “boom_bot” “my.eet” “BOOM” “1000.0” “-35.4” “76.85” “45.6” “boom_cen” “my.eet” “BOOM” “1000.0” “-35.4” “76.85” “45.6” “link” “my.eet” “LINK” “1000.0” “102.4” “80.0” “0.0”
Note: The two files above would require that the ensight geometry file contain parts labeled bucket_property_1, bucket_property_2, boom_property_1, boom_property_2, boom_property_3, boom_enda, boom_endb, boom_top, boom_bot, boom_cen, and link, and that the my.eet file contain titles BUCKET, BOOM, and LINK.
Sample File (using part numbers and optional scaling, offsets and rotations - with the offsets before the rotations. Also has some comments in the file):
EnSight Rigid Body version 1.1 names 11 “bucket_property_1” “my.eet” “BUCKET” “1000.0” “yzx” “0.0” “90.0” “0.0” “bucket_property_2” “my.eet” “BUCKET” “1000.0” “yzx” “0.0” “90.0” “0.0” “boom_property_1” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0” “boom_property_2” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0” “boom_property_3” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0” “boom_enda” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0” “boom_endb” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0” “boom_top” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0” “boom_bot” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0” “boom_cen” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0” “link” “my.eet” “LINK” “1000.0” “yzx” “0.0” “90.0” “0.0”
Sample File (using part numbers and optional scaling, offsets and rotations - with the rotations before the offsets. Also has some comments in the file):
EnSight Rigid Body version 1.1 numbers 11 “1” “my.eet” “BUCKET” “1000.0” “yzx” “0.0” “90.0” “0.0” “383.7” “105.23” “0.0” “2” “my.eet” “BUCKET” “1000.0” “yzx” “0.0” “90.0” “0.0” “383.7” “105.23” “0.0” “3” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0” “-35.4” “76.85” “45.6” “4” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0” “-35.4” “76.85” “45.6” “5” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0”“-35.4” “76.85” “45.6” “6” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0”“-35.4” “76.85” “45.6” “7” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0”“-35.4” “76.85” “45.6” “8” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0”“-35.4” “76.85” “45.6” “9” “my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0”“-35.4” “76.85” “45.6” “10”“my.eet” “BOOM” “1000.0” “yzx” “0.0” “90.0” “0.0”“-35.4” “76.85” “45.6” “11”“my.eet” “LINK” “1000.0” “yzx” “0.0” “90.0” “0.0”“102.4” “80.0” “0.0”
Note, the two files above would require that the ensight geometry file contain 11 parts and that the my.eet file contain titles BUCKET, BOOM, and LINK.
In addition to linking EnSight parts to the transformations in the rigid body Euler Parameter file (see Euler Parameter File Format), version 2 of this file can also be used to specify any number of pre and post transformations. These can range from the common translation, rotation, and scaling transformations, to providing your own 4x4 matrices. Thus arranging portions of a model can be done in a straight-forward manner.
First it is important to know the order that transformations will be applied. Basically it will come in three stages:
[pre-transforms] x [euler-transforms] x [post-transforms]
where:
[pre-transforms] consists of concatenated T,S,R and M transforms in the user specified order.
[euler-transforms] consists of the euler rotation, followed by the euler translations.
[post-transforms] consists of concatenated T,S,R and M transforms in the user specified order.
And the valid transformations are:
|
Command |
Description |
||
|
Tx: |
value |
Translation in x |
|
|
Ty: |
value |
Translation in y |
|
|
Tz: |
value |
Translation in z |
|
|
Sz: |
value |
Scaling in x |
|
|
Sy: |
value |
Scaling in y |
|
|
Sz: |
value |
Scaling in z |
|
|
Rx: |
value (degrees) |
Rotation about x |
|
|
Ry: |
value (degrees) |
Rotation about y |
|
|
Rz: |
value (degrees) |
Rotation about z |
|
|
Rxr: |
value (radians) |
Rotation about x |
|
|
Ryr: |
value (radians) |
Rotation about y |
|
|
Rzr: |
value (radians) |
Rotation about z |
|
|
M: |
16 values |
User supplied 4x4 matrix values (applied to geometry only): a11,a12,a13,a14, a21,a22,a23,a24, a31,a32,a33,a34, a41,a42,a43,a44 |
|
|
Mv: |
16 values |
User supplied 4x4 matrix values (applied to both geometry) and vectors: a11,a12,a13,a14, a21,a22,a23,a24, a31,a32,a33,a34, a41,a42,a43,a44 |
|
|
Eul: |
"eet_fle" "eet_trans_title" <"units_scale"> |
Required reference to .eet file and the specific transform within that file. The units_scale is optional. Note: The quotes indicated are required. |
|
The first line needs to be exactly as shown.
EnSight Rigid BodyThe second line must be the .erb version number line.
version 2.0
The third line must either be exactly.
names
or
numbers
This indicates whether part names or part numbers will be used in the association of ensight parts to the rigid body information in the Euler Parameter File.
The fourth line must be a single integer n indicating the number of "euler transform" associations that follow in the file.
For each "euler transform" association indicated in 3. above:
There must be a line with:
"ens_part_name"
or
"ens_part_#(s)"
And a line with the number of transforms that will be used for this "euler transform" association.
Then for each of the transforms declared in a), there must be one of the valid transforms listed in the table above.
Note: Blank lines are allowed. And anything beyond a "#" sign will ignore everything else on that line.
An example is probably the best way to illustrate the use and flexibility of this file format. Below is the image a simple set of parts that will be used to assemble a vehicle with four wheels, and move it along a road, with the wheels turning.
Here is the contents of the EnSight Gold casefile, which references the veh.erb file:
FORMAT type: ensight gold GEOMETRY model: veh.geo rigid_body: veh.erb VARIABLE: vector per element: evect veh.vec
And here is the contents of the veh.erb file, which will assemble the four wheels onto the body, and onto the road, allow for the transient movement of the assembled vehicle along the road, with the wheels turning, and have everything be done in the xz plane instead of the xy plane:
EnSight Rigid Body version 2.000000 names 6 "Body" 2 Eul: "veh.eet" "BODY" # .eet file only has forward trans for BODY Mv:1.0 0.0 0.0 0.0 # A -90 rotation about x axis, matrix option 0.0 0.0 -1.0 0.0 # Since is Mv:, Will apply to vectors also. 0.0 1.0 0.0 0.0 # Note that a Rx: -90 would do the same. 0.0 0.0 0.0 1.0 "LF_Wheel" 6 Tx: -4.5 # trans & rotate into position at origin Ty: -2.5 Ry: -90.0 # Rx:,Ry:,Rz: are degrees. Eul: "veh.eet" "WHEEL" # .eet has rot & forward trans for WHEEL Ty: 4.5 # trans back to desired location Rx: -90.0 # Use the simpler Rx: command "RF_Wheel" 8 Tx: -4.5 Ty: -2.5 Ry: -90.0 Sx: -1.0 # Mirroring, keeps wheel outside outward Eul: "veh.eet" "WHEEL" Tx: 3.0 Ty: 4.5 Rx: -90.0 "LR_Wheel" 6 Tx: -4.5 Ty: -2.5 Ry: -90.0 Eul: "veh.eet" "WHEEL" Ty: 0.5 Rx: -90.0 "RR_Wheel" 8 Tx: -4.5 Ty: -2.5 Ry: -90.0 Sx: -1.0 Eul: "veh.eet" "WHEEL" Tx: 3.0 Ty: 0.5 Rx: -90.0 "Road" 4 Tx: 4.5 Tz: -0.5 Eul: "veh.eet" "ROAD" M: 1.0 0.0 0.0 0.0 # Not transforming vector for this one. 0.0 0.0 -1.0 0.0 # orig vector was in +z, it stays such. 0.0 1.0 0.0 0.0 0.0 0.0 0.0 1.0
So the model becomes:
Note: The assemblage has taken place, wheels are place properly on the body and the vehicle is on the road, and it is all now in the xz plane. Note that the vectors are also correct, including the one for the road - where we didn't transform it - so it is still in the z direction.
The model will be transient because the .eet file has 21 steps. So, if you step through time, you will see the vehicle move with the wheels turning.
For completeness, here are the contents of the other files used in this example. Note that this model is included in the EnSight distribution (under .../data/user_manual/rigid_body_example/erb2_example):
The veh.geo file:
EnSight vehicle example geometry
--------------------------------
node id given
element id given
extents
-5.00000e+00 5.00000e+00
0.00000e+00 1.30000e+10
-0.58000e+00 0.58000e+00
part
1
Body
coordinates
4
1
2
3
4
0.00000e+00
3.00000e+00
3.00000e+00
0.00000e+00
0.00000e+00
0.00000e+00
5.00000e+00
5.00000e+00
0.00000e+00
0.00000e+00
0.00000e+00
0.00000e+00
quad4
1
10
1 2 3 4
part
2
LF_Wheel
coordinates
5
1
2
3
4
5
4.00000e+00
5.00000e+00
5.00000e+00
4.00000e+00
4.50000e+00
2.00000e+00
2.00000e+00
3.00000e+00
3.00000e+00
2.50000e+00
0.00000e+00
0.00000e+00
0.00000e+00
0.00000e+00
0.20000e+00
pyramid5
1
100
1 2 3 4 5
part
3
RF_Wheel
coordinates
5
1
2
3
4
5
4.00000e+00
5.00000e+00
5.00000e+00
4.00000e+00
4.50000e+00
2.00000e+00
2.00000e+00
3.00000e+00
3.00000e+00
2.50000e+00
0.00000e+00
0.00000e+00
0.00000e+00
0.00000e+00
0.20000e+00
pyramid5
1
200
1 2 3 4 5
part
4
LR_Wheel
coordinates
5
1
2
3
4
5
4.00000e+00
5.00000e+00
5.00000e+00
4.00000e+00
4.50000e+00
2.00000e+00
2.00000e+00
3.00000e+00
3.00000e+00
2.50000e+00
0.00000e+00
0.00000e+00
0.00000e+00
0.00000e+00
0.20000e+00
pyramid5
1
300
1 2 3 4 5
part
5
RR_Wheel
coordinates
5
1
2
3
4
5
4.00000e+00
5.00000e+00
5.00000e+00
4.00000e+00
4.50000e+00
2.00000e+00
2.00000e+00
3.00000e+00
3.00000e+00
2.50000e+00
0.00000e+00
0.00000e+00
0.00000e+00
0.00000e+00
0.20000e+00
pyramid5
1
400
1 2 3 4 5
part
6
Road
coordinates
4
1
2
3
4
-5.00000e+00
-1.00000e+00
-1.00000e+00
-5.00000e+00
0.00000e+00
0.00000e+00
1.30000e+01
1.30000e+01
0.00000e+00
0.00000e+00
0.00000e+00
0.00000e+00
quad4
1
20
1 2 3 4
The veh.vec file:
elemental vector
part
1
quad4
0.00000e+00
0.00000e+00
1.00000e+00
part
2
pyramid5
0.00000e+00
0.00000e+00
1.00000e+00
part
3
pyramid5
0.00000e+00
0.00000e+00
1.00000e+00
part
4
pyramid5
0.00000e+00
0.00000e+00
1.00000e+00
part
5
pyramid5
0.00000e+00
0.00000e+00
1.00000e+00
part
6
quad4
0.00000e+00
0.00000e+00
1.00000e+00
The veh.eet file:
Ens_Euler NumTimes: 21 NumTrans: 3 Titles: WHEEL BODY ROAD Time Step: 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 6.00 0.0 0.4 0.0 9.510565e-01 -3.090170e-01 0.000000e+00 0.000000e+00 0.0 0.4 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 12.00 0.0 0.8 0.0 8.090170e-01 -5.877853e-01 0.000000e+00 0.000000e+00 0.0 0.8 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 18.00 0.0 1.2 0.0 5.877853e-01 -8.090170e-01 0.000000e+00 0.000000e+00 0.0 1.2 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 24.00 0.0 1.6 0.0 3.090170e-01 -9.510565e-01 0.000000e+00 0.000000e+00 0.0 1.6 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 30.00 0.0 2.0 0.0 0.000000e+00 -1.000000e+00 0.000000e+00 0.000000e+00 0.0 2.0 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 36.00 0.0 2.4 0.0 -3.090170e-01 -9.510565e-01 0.000000e+00 0.000000e+00 0.0 2.4 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 42.00 0.0 2.8 0.0 -5.877853e-01 -8.090170e-01 0.000000e+00 0.000000e+00 0.0 2.8 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 48.00 0.0 3.2 0.0 -8.090170e-01 -5.877853e-01 0.000000e+00 0.000000e+00 0.0 3.2 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 54.00 0.0 3.6 0.0 -9.510565e-01 -3.090170e-01 0.000000e+00 0.000000e+00 0.0 3.6 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 60.00 0.0 4.0 0.0 -1.000000e+00 0.000000e+00 0.000000e+00 0.000000e+00 0.0 4.0 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 66.00 0.0 4.4 0.0 -9.510565e-01 3.090170e-01 0.000000e+00 0.000000e+00 0.0 4.4 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 72.00 0.0 4.8 0.0 -8.090170e-01 5.877853e-01 0.000000e+00 0.000000e+00 0.0 4.8 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 78.00 0.0 5.2 0.0 -5.877853e-01 8.090170e-01 0.000000e+00 0.000000e+00 0.0 5.2 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 84.00 0.0 5.6 0.0 -3.090170e-01 9.510565e-01 0.000000e+00 0.000000e+00 0.0 5.6 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 90.00 0.0 6.0 0.0 0.000000e+00 1.000000e+00 0.000000e+00 0.000000e+00 0.0 6.0 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 96.00 0.0 6.4 0.0 3.090170e-01 9.510565e-01 0.000000e+00 0.000000e+00 0.0 6.4 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 102.00 0.0 6.8 0.0 5.877853e-01 8.090170e-01 0.000000e+00 0.000000e+00 0.0 6.8 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 108.00 0.0 7.2 0.0 8.090170e-01 5.877853e-01 0.000000e+00 0.000000e+00 0.0 7.2 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 114.00 0.0 7.6 0.0 9.510565e-01 3.090170e-01 0.000000e+00 0.000000e+00 0.0 7.6 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 Time Step: 120.0 0.0 8.0 0.0 1.0 0.0 0.0 0.0 0.0 8.0 0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0
Some additional comments:
Rotations, either in degrees or radians (Rx,Ry,Rz,Rxr,Ryr,Rzr) and scaling (Sx,Sy,Sz) are applied to both geometry and vector variables. Translations (Tx,Ty,Tz) are applied only to geometry. Note that the user can use the M: or Mv: options if they want to supply their own 4x4 matrices. M: gets applied to geometry only. Mv: gets applied to both geometry and vector fields. Thus, the user has control. If the contents of the user-supplied matrix contains both rotations and translations, and you have vector fields of interest, you may want to consider separating them into two separate matrices.
Pre- and post- transformations are separated by the Eul: transformation. Thus a Eul: line is required for any of the "part(s)" that you call out in the .erb file. You do not have to reference any part(s) that do not have any rigidbody motion or a need for a different orientation. If you need to orient a part that does not have transient rigidbody euler transformations, simply include a transform in the .eet file that has zero translation and rotation. The appropriate line(s) in the .eet file would be:
0.0 0.0 0.0 1.0 0.0 0.0 0.0
And in fact, if the model had no transient rigidbody motion, but you wanted to use the .erb file to orient the portions of the model, you could create a no-op.eet file like:
Ens_Euler Numtimes: 1 NumTrans: 1 Titles: NO-OP Time Step: 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0
And the Eul: line in the .erb file would be:
Eul: "no-op.eet" "NO-OP"
The example does not show the use of the units scaling factor. It is rarely needed. If it is specified, the translations in the .eet file are multiplied by this factor.
While the format allows for different .eet files, EnSight can only currently handle one per model. So, place all transient euler transformations into the same .eet file.