


Understanding the output Distance in the Camera MIL Sensor Block
This page helps you to understand, verify the distance measured by the Camera MIL sensor block.
Front axle track reference. |
|
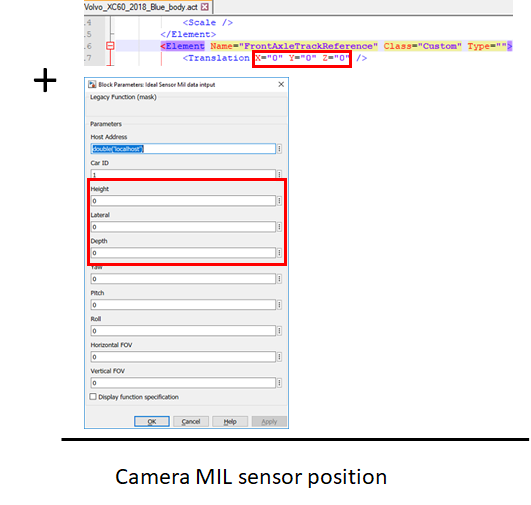
Camera MIL sensor position corresponding to the Front axle track reference X Y Z. |
|
 |
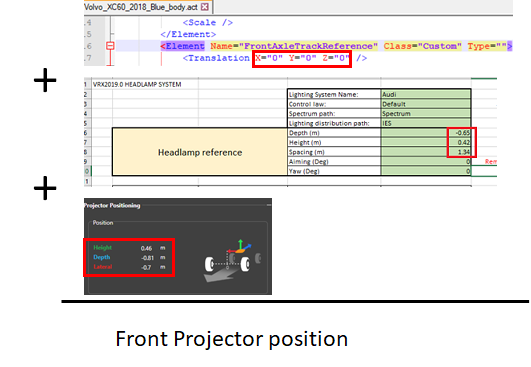
Projector of the detected car. Note that the projectors are positioned in relation to the rear axle track reference X Y Z. |
For the front projector, the distance measurement is based on the:
Camera MIL Sensor position.
You can determine the Camera Mil Sensor position by adding the <FrontAxleTrackReference X Y Z> values of the body.act file and the Height, Lateral, Depth input values of the Simulink block.
Front projector position.
You can determine the projector position by adding the <FrontAxleTrackReference X Y Z> values of the body.act file, and the Depth, Height and Spacing values of the Lighting system and the customized Height, Depth and Spacing values in the interface.
Pythagorean theorem
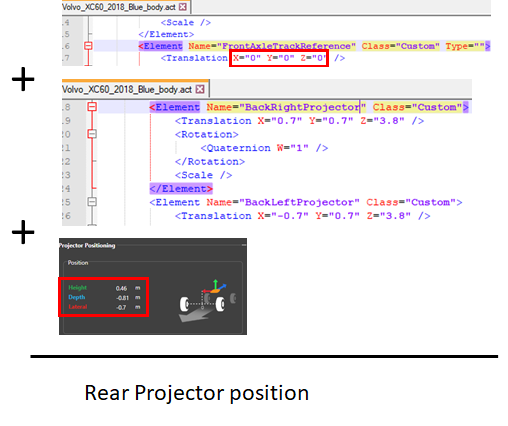
For the rear projector, the distance measurement is based on the:
Camera MIL Sensor position.
You can determine the Camera MIL Sensor position by adding the <FrontAxleTrackReference X Y Z> values of the body.act file and the Height, Lateral, Depth input values of the Simulink block.
Rear projector position.
You can determine the projector position by adding the <FrontAxleTrackReference X Y Z> values of the body.act file, the <BackRightProjector X Y Z> values or <BackLeftProjector X Y Z> values from the body.act and the customized values in the interface.
Pythagorean theorem