


The different types of analysis that can be performed are: Linear Static Analysis, Modal Analysis and Legacy analysis. Each analysis requires various parameters and inputs, which are explained in the following sections.
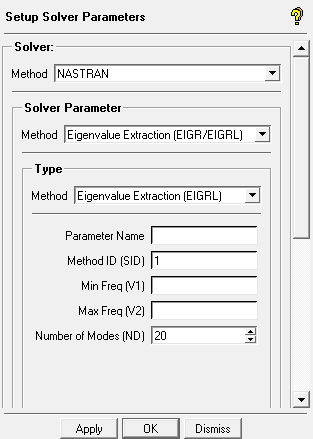
- Eigenvalue Extraction (EIGR / EIGRL)
Method ID (SID)
Set ID number (Unique integer > 0)
V1, V2
For vibration analysis, the frequency range of interest.
Number of Modes (ND)
Number of frequencies desired.
- Buckling Analysis (EIGB)
Method ID (SID)
Set ID number (Unique integer > 0)
SINV
Enhanced inverse power method.
INV
Inverse power method.
Lower / Upper Eigenvalues (L1, L2)
The Eigenvalue range of interest. Eigenvalues are the factors by which the pre-bucking state of stress is multiplied to produce buckling in the shape defined by the corresponding Eigenvector.
Desired Number of Positive / Negative Roots (NDP, NDN)
NORM
Method for normalizing eigenvectors. The MAX option (default) normalizes eigenvectors to the unit value of the largest component in the analysis set. The POINT option normalizes eigenvectors to the unit value of the component defined in the G and C fields, where G is the Grid or scalar point ID, and C is the Component number. The value for NORM defaults to MAX if the defined component is zero.
- Nonlinear Static Analysis Control (NLPARM)
Number of Increments (NINC)
0<Integer<1000, Default=10.
Incremental time interval for creep analysis. The unit of DT must be consistent with units used for the CREEP entry that defines its characteristics.
KMETHOD
The stiffness update strategy.
Number of Iterations (KSTEP)
Number of iterations before the stiffness update for the ITER method. The stiffness matrix is updated on convergence if KSTEP is less than the number of iterations that were required for convergence with the current stiffness.
Max Iterations (MAXITER)
The limit on the number of iterations for each load increment.
CONV
Flags to select convergence criteria. U=Displacement error, P=Load equilibrium error, W=work error and the error tolerances (EPSU, EPSP, and EPSW) define the convergence criteria.
INTOUT
Intermediate output flag. Controls the output requests for displacements, element forces and stresses, etc.
Max Divergence (MAXDIV)
The limit on the probable divergence condition per iteration before the solution is assumed to diverge. (Integer not equal to 0: Default=3)
Manimum Number of Quasi-Newton (MAXQN)
Newton correction vectors to be saved in the database.
Max Number of Line Search (MAXLS)
Maximum number of line searches allowed for each iteration.
Fraction of Effective Stress (0.0–1.0) (FSTRESS)
Fraction of effective stress used to limit the sub-increment size in the material routines.
Line Search Tolerance (0.01–0.9) (LSTOL)
Line search tolerance.
Max Number of Bisections (MAXBIS)
Maximum number of bisections allowed for each load increment.
Max Ratio (1.0–40.0) (MAXR)
Maximum ratio for the adjusted arc length increment relative to the initial value.
Max Value of Incremental Rotation (RTOLB)
Maximum value of incremental rotation (in degrees) allowed per iteration to activate bisection.
- Transient Time Step (TSTEP)
Defines the step intervals at which a solution will be generated, and the output in transient analysis.
Number of Time Steps
Number of time steps of value DTi (integer greater than or equal to 1)
- Frequency (FREQ / FREQ1 / FREQ2)
Frequency List (FREQ)
Number of Frequencies
Defined number of frequencies.
Frequency List (FREQ1)
The Frequency List (FREQ1) options define a set of frequencies to be used in the solution of frequency response problems, specified by the First Frequency (F1), the Frequency Increment (DF), and the Number of Frequency Increments (NDF) desired.
Frequency List (FREQ2)
The Frequency List (FREQ2) options define a set of frequencies to be used in the solution of frequency response problems, specified by the First Frequency (F1), the Frequency Increment (DF), and the Number of Logarithmic Increments (NF).
- Dynamic Load (DAREA / DELAY / DPHASE)
Load Scale Factor (DAREA)
Defines scale (area) factors for static and dynamic loads. In dynamic analysis, DAREA is used in conjunction with RLOADi and TLOAD entries.
Pi
Grid, extra or scalar point identification number. (Integer >0)
Ci
Component number (Integer 1 through 6 for grid point, blank or 0 for extra scalar point).
Ai
Scale (area) factor.
Dynamic Load Time Delay (DELAY)
Pi
Grid, extra or scalar point identification number. (Integer >0)
Ci
Component number (Integer 1 through 6 for grid point, blank or 0 for extra scalar point).
Ti
Time delay for designated point Pi and component Ci.
Dynamic Load Phase Lead (DPHASE)
Defines the phase lead term theta in the equation of the dynamic loading function.
Pi
Grid, extra or scalar point identification number. (Integer >0)
Ci
Component number (Integer 1 through 6 for grid point, blank or 0 for extra scalar point).
THi
Phase lead theta in degrees.
- Dynamic Excitation (TLOAD/RLOAD)
Transient Response (TLOAD1)
Defines a time dependent dynamic load or enforced motion, for use in transient response analysis.
DAREA
Identification number of DAREA set or a thermal load set that defines enforced acceleration using large mass or SPC/SPCD data.
DELAY
Identification number of delay entry set.
EXCITATION TYPE
Defines the type of dynamic excitation.
TABLEDi
Identification number of TABLEDi entry.
Transient Response (TLOAD2)
Includes the same parameters as Transient Response (TLOAD1), in addition to the parameters: Time Constants (T1, T2), Frequency (F), Phase Angle (P), Exponential Coef. (C), and Growth Coef. (B).
Frequency Response (RLOAD1)
Defines a frequency dependent dynamic excitation for use in frequency response problems.
Frequency Response (RLOAD2)
Includes the same parameters as Frequency Response (RLOAD1).
- Dynamic Load Combination (DLOAD)
Defines a dynamic loading condition for frequency response or transient response problems as a linear combination of load sets defined via RLOAD1 or RLOAD2 entries for frequency response, or TLOAD1 or TLOAD2 entries for transient response.
Global Scale Factor (S)
The Global Scale Factor.
Number of loads
The number of Load Set ID numbers of RLOAD1, RLOAD2, TLOAD1, and TLOAD2.
- Static Load Combination (LOAD)
Defines a static load as a linear combination of load sets.
Global Scale Factor (S)
The Global Scale Factor.
Number of loads
The number of Load Set ID numbers used to define the LOAD.
- Single-Point Constraint Combination (SPCADD)
Defines a single-point constraint set as the combination of other defined single-point constraint sets.
- Multi-Point Constraint Combination (MCADD)
Defines a multipoint constraint set as combination of other multipoint constraint sets.
- Default Grid Point Temperature (TEMPD)
Defines a temperature value for all grid points of the structural model that have not been given a temperature on a TEMP entry.
- Acceleration or Gravity Load (GRAV)
Defines acceleration vectors for gravity or other acceleration loading.
LCS
Identify the local coordinate system.
MB
Indicates whether the local coordinate system (LCS) is defined in the main Bulk Data Section (MB = -1) or the partitioned superelement Bulk Data Section (MB = 0). Coordinate systems referenced in the main Bulk Data Section are defined relative to the assembly basic coordinate system, which is fixed. This feature is useful when a superelement defined by a partitioned Bulk Data section is rotated or mirrored.
Scale Factor
Scale factor of the acceleration vector.
Vector Components
Acceleration vector components measured in the specified coordinate system.
- Include File (INCLUDE)
Inserts an external file (*.dat, *.nas, *.bdf) into the input file using an INCLUDE statement.