


引导光束(The Pilot Beam)
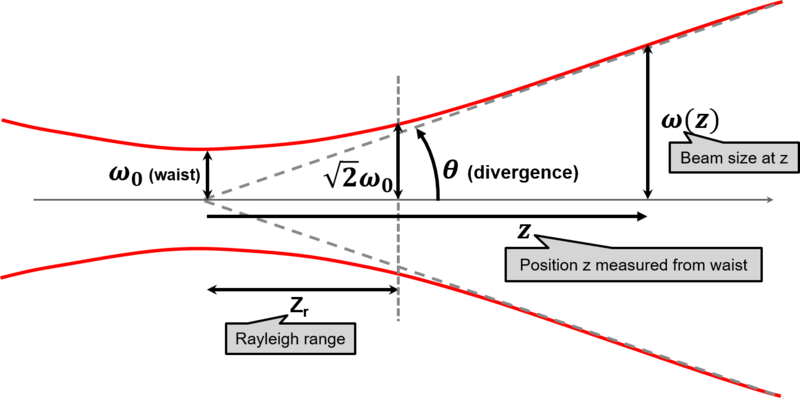
束腰为ω0的高斯光束,瑞利范围由下式给出:

光束的相位曲率半径是距束腰的距离z的函数:

从上式可以看出,z=0时瑞利半径无限大,在z = zr时半径达到最小值2zr。当z逼近无限时,瑞利半径渐近逼近无穷大。高斯光束轴向的相位由Gouy偏移定义,如下:

例如,在瑞利距离处,轴向相位是π/4。光束的大小也是该距离的函数:

注意远距离时光束的大小会线性增大。光束的发散角由下式给出:

考虑到通过采样离散的点来数值化表示光束的问题,如果使用的点的间距恒定,当传播距离到离束腰很远的位置时,光束将扩展到列阵的边缘之外。因此,远离束腰时,点间距与z成正比进行坐标线性扩展是最好的。然而,在束腰附近时,光束尺寸不会减小到零,而 是保持合理的常数大小,在这种情况下,恒定值采样是最方便的。 这种折衷的采样系统,在束腰附近使用恒定的采样间距,在距束腰较远处使用线性缩放的采样间距。
之前开发的衍射理论并没有对正在传播的电场定义任何特定的形状或形式,算法在很大程度上独立于电场分布。然而,采样的问题依然存在。计算(甚至定义)具有不规则孔径或不存在孔径的任意像差光束的菲涅尔数字也是不切实际的。
出于这个原因,使用引导光束(pilot beam)来辅助物理光学传播算法来确定选择哪种传播算法。引导光束是理想的高斯光束,具有束腰、光束尺寸、相位半径和相对z位置。初始参数通过对初始光束分布进行高斯方程拟合生成。然后,引导光束从表面依次传播。在每个表面计算新的光束参数,例如新的束腰、相位半径或位置。然后使用引导光束的特性来确定实际光束分布是在瑞利范围之内还是之外,以及使用哪类传播算法是合适的。
光束穿过孔径(如小孔)之后,可能需要重新计算引导光束的参数,后续帮助文件中会有叙述。
与近轴高斯光束比较
虽然引导光束是理想高斯光束,但它与近轴高斯光束工具不同。引导光束由真实光线传播,这些光线被称为探测光线。关于探测光线的更多详细信息,请参考"通过任意光学表面传播(Propagation Through Arbitrary Optical Surfaces)"。使用探测光线能体现所有状况,即通过非理想光学传播的状况。
另一方面,近轴高斯光束在传播光束时仅使用近轴数据。因此,使用引导光束得到的结果与使用近轴高斯光束得到的结果略有不同。即便是在无折射的空气传播中也存在这种差异,此时这些真实光线的斜率与绝对线性的近轴光线稍微不同。当光束速度快时,这种差异会变得显著。有关高速光束的限制信息,请参阅"算法假设(Algorithm Assumptions)"。
下一部分: