


视场光焦图(Power Field Map)

此功能可计算随视场位置变化的光焦度或有效焦距。此功能的常见应用是渐变多焦镜头(Progressive Addition Lens, PAL)的球面和柱面光焦度的分析。另请参阅"光瞳光焦图(Power Pupil Map)"。
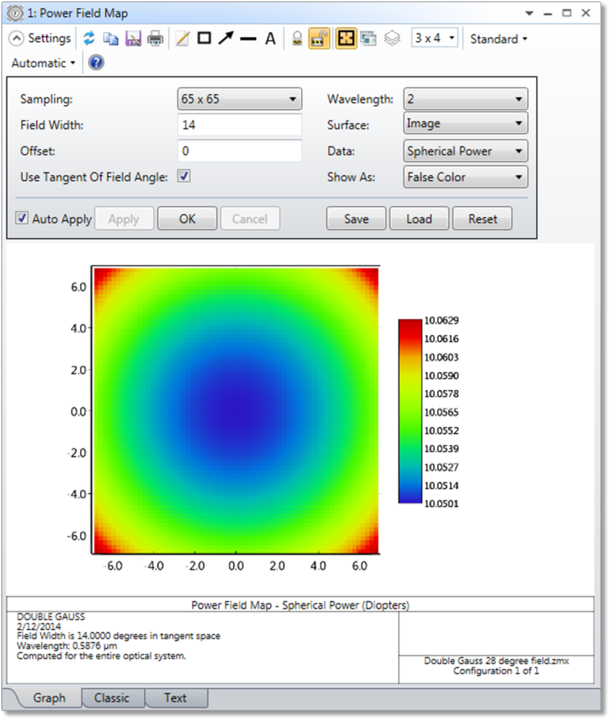
采样(Sampling) 分析中使用的矩形网格的尺寸。
视场宽度(Field Width) 视场全宽(以视场单位为单位)。
偏移(Offset) 添加至计算数据的用户自定义偏移值。
波长(Wavelength) 分析中使用的波长编号。
表面(Surface) 带有光焦度的最后一个表面。将系统作为一个整体计算光焦度和EFL数据时,最多可包括此表面的折射率进行计算。请参阅下面的详述。
使用视场角正切值(Use Tangent of Field Angle) 如果选中,并且视场类型是角度(以度为单位),则显示的数据空间分布与视场角正切值(而非视场角)成正比。
数据(Data) 要计算的数据。选项包括球面光焦、柱面光焦、最大光焦、最小光焦、子午光焦、弧矢光焦、Y方向光焦、X方向光焦和像散光焦(X轴减Y轴),上述均以屈光度为单位;或以镜头单位表示的X与Y方向的有效焦距(EFL)。
显示为(Show As) 选择表面、等高线图、灰阶或伪彩图等作为显示选项。此外,还提供横跨X轴或Y轴方向的视场扫描。
等高线格式(Contour Format) 等高线格式字符串。有关等高线格式字符串语法的详述,请参阅下面的"等高线格式字符串(The Contour Format String)"。
详述(Discussion)
此功能可计算随视场坐标变化的光焦度或焦距。将光学系统作为一个整体确定光焦度或焦距时,可包括任意表面的折射率。所使用的方法是,追迹视场各点主光线周围的实际光线环。使用光线数据确定每个视场位置的焦距。再用此焦距计算镜头光焦度,以屈光度(米的倒数)为单位。通常情况下,焦距随入瞳中的方向变化而变化。通过追迹光线环,可以确定光瞳周围光焦度或焦距的平均值、最大值和最小值。根据此数据,可以计算多种类型的光焦度。注意:根据这些项的不同用途,此功能使用的定义可能会有所不同。
可根据入瞳的平均光焦度确定球面光焦度。最大和最小光焦度是光瞳的极值。柱面光焦度被定义为最大光焦度与最小光焦度之差。注意:使用此定义时,柱面光焦度值始终是正值。对于柱面,报告的有效焦距值是最大焦距和最小焦距之差。对于像散有效焦距,报告的值是X方向焦距和Y方向焦距之差。
此功能还可用于计算子午方向或弧矢方向的光焦度。在此,子午方向的平面包含物空间中的主光线和局部坐标z轴。弧矢方向与子午方向正交。此外还可以计算Y方向和X方向光焦度。这些方向是根据入瞳的局部坐标方向定义的。像散光焦度被定义为X方向光焦度和Y方向光焦度之差。
表面设置应定义所测定透镜部分有光焦度的最后一个表面。建议将此设置手动设为正确的值,而不使用默认的"像面"设置。因为这样可以使用精确的光线追迹计算光焦度,并且最准确的数据是从最后一个光焦面折射后直接产生的光线数据。如果光线穿过透镜传播的距离很长,OpticStudio可能无法正确解析某些模棱两可的情况。
"偏移"值是用户自定义添加到所有计算数据中的值。此功能可用于评估相对于某些用户自定义的参考值的偏差。
要针对特定光焦度优化透镜,请参阅POWF优化操作数。
下一部分: