
Feedback Iterator Component Properties
The Feedback Iterator's primary role is to control iterative solves and its properties support this end.
For Maxwell and HFSS, the Feedback Iterator properties are as shown below:
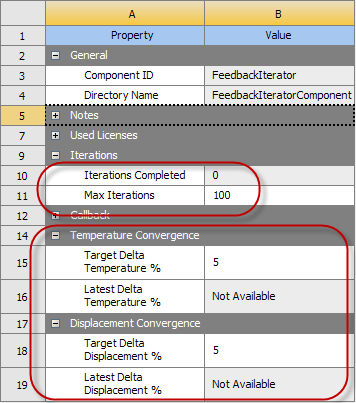
- Iterations Completed: displays the number of iterations completed. A “read-only” property.
- Max Iterations: sets the maximum number of iterative solve loops to perform before terminating iterations in case the Target Delta Temperature % or Target Delta Displacement % is not achieved. Default value is 100.
- Target Delta Temperature %: specifies the maximum Target Delta Temperature %, which signifies convergence. Default value is 5%. Value must be 0.01 or greater.
- The delta temperature error is calculated base on the SI unit: Kelvin.
- The Maxwell and HFSS design Profile tabs display absolute/relative delta data, while the delta temperate in Workbench means the relative delta (expressed as %).
- Target Delta Displacement %: specifies the maximum Target Delta Displacement % which signifies convergence. Default value is 5%. Value must be 0.01 or greater.
The Feedback Iterator properties also display the most recently achieved Latest Delta Temperature % and Latest Delta Displacement % values, allowing the user to manually abort when suitably satisfied with the achieved deltas.
When we run a two-way feedback simulation from WB, and keep the Maxwell or HFSS Profile tab open (right-click on Results in the Project Manager and select Solution Data, then select Profile tab), you will see that the 3D solver keeps track of two feedback related quantities:
- Maximum Absolute/Relative Delta Temperature (if temperature feedback is enabled)
- Maximum Absolute/Relative Delta Displacement (if
displacement feedback is enabled)
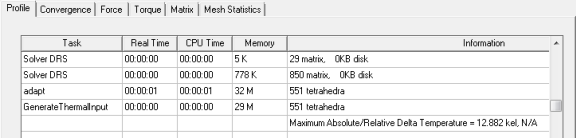
These signify the maximum difference on the solution mesh of the quantity in question from one feedback iteration to the next (thus the value is only available from iteration #2 onward). This data is the basis for the convergence controls in the Feedback Iterator. These controls allow the user to base the termination of the feedback iterations based on a target max delta T and/or max delta displacement. Thus the target max delta forms the convergence condition.