
Current Controlled Switch (SW_I)
The current controlled switch comes in two flavors: with controlling port and without a controlling port. In either case a model data for the current controlled switch needs to be specified, similarly to the case of the diode.
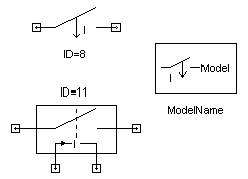
Right-click the current controlled switch model and select Properties. With the Parameter Values tab selected, specify the switch model name (in the MOD line) as well as the ID of the controlling element: either an ammeter or a voltage source. In the later case the controlling quantity is the current through the voltage source. (Note that an ammeter is a voltage source with zero voltage, that is, a short circuit).
The current controlled switch with controlling port allows for the controlling quantity to be wired directly using connections with wires. In this case a reference arrow in the controlling port is displayed and is internally used as current reference (positive current flow as indicated by the arrow).
In the model for the current controlled switch the following parameters are used:
- Ron is the resistance of the switch in the on state (0.001 ohms default value).
- Roff is the resistance of the switch in the off state (1,000,000 ohms default value).
- Ion is the "on" value of the controlling current in amps. If I > Ion, then R = Ron.
- Ioff is the "off" value of the controlling current in amps. If I < Ioff, then R = Roff.

where fcontrol(P) is a function describing the controlling signal, which is a time, position, or speed dependent current source or voltage source. Function G(P) clearly shows that the magnitude of the conductance is dictated by both the value of Ron and the magnitude of the control signal, while the time / position / speed dependency is dictated by the control signal itself.

where fcontrol(P) is a function describing the controlling signal, which is a time, position, or speed dependent current source or voltage source. Function R(P) clearly shows that the magnitude of the conductance is dictated by both the value of Roff and the magnitude of the control signal, while the time / position / speed dependency is dictated by the control signal itself.