
Pattern Search (Search-Based)
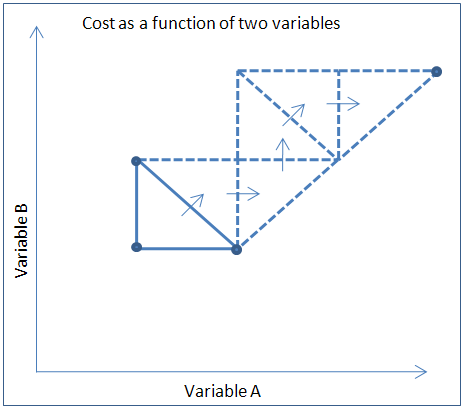
If the noise is significant in the nominal project, use the Pattern Search optimizer to obtain the results. It performs a grid-based simplex search, which makes use of simplices: triangles in 2D space or tetrahedra in 3D space. A simplex is a Euclidean geometric spatial element having the minimum number of boundary points, such as a line segment in one-dimensional space, a triangle in two-dimensional space, or a tetrahedron in three-dimensional space.
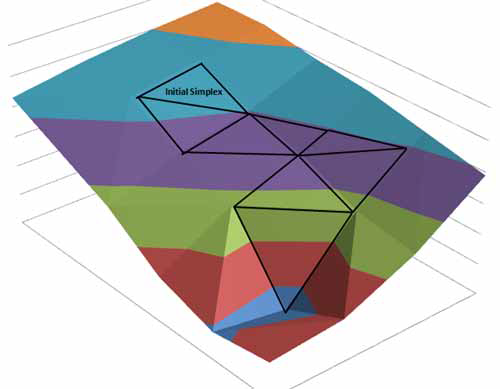
The cost value is calculated at the vertices of the simplex. The optimizer mirrors the simplex across one of its faces based on mathematical guidelines and determines if the new simplex provides better results. If it does not produce a better result, the next face is used for mirroring and the pattern continues. If no improvement occurs, the grid is refined. If improvement occurs, the step is accepted and the new simplex is generated to replace the original one. The figures below illustrate a triangular simplex mirrored several times to demonstrate the pattern search approach in two variables and the simplices superimposed on a 2D cost function to demonstrate the convergence toward a minimum in the cost function.
Cost functions can be quite nonlinear. As a result, during the function evaluations of the algorithm, the cost function can vary significantly. Also, it is important to understand the relationship between optimization function evaluation and iteration. Every iteration, depending on the number of parameters to be optimized, performs several function evaluations. These function evaluations, depending on how nonlinear the cost function is, could show drastic changes. The presence of drastic changes has no bearing on whether the optimization algorithm converged or not.
In the case of non-gradient search-based optimization algorithms, such as "pattern search," which are entirely based on function evaluations, one could see drastic changes in the function evaluations depending on how nonlinear the cost function is. This could seem misleading as if the algorithm did not converge since in theory one expects the cost function to decrease from one iteration to the next. The optimetrics, however, reports function evaluations and not necessarily the optimizer performance per iteration.
The MATLAB optimizer displays function evaluation when the Show all functions evaluation check box is selected. If the check box is not selected, it displays iteration.
The Pattern Search algorithms are extensible to three variable optimization by using tetrahedral simplices, however, they are not easily represented in graphical form. Generally, Pattern Search algorithms are not used when more than three variables are used in the optimization.
When there is no improvement in the cost function regardless of the direction the simplex is mirrored, then the simplex is subdivided into smaller simplices and the process restarted.
Pattern Search algorithms have several advantages over Quasi-Newton algorithms. First, they are less sensitive to noise because the cost function is evaluated at all node points on the simplex and the numerical noise averages out over the simplex. The second advantage is that the number of initial solutions is generally smaller. However, since the pattern search does not use gradient information to locate the minimum the process converges more slowly toward the true minimum, taking more steps to successively divide the simplices as the minimum is approached.